People mainly use the senses of sight and hearing to communicate with each other. There are many types of communication such as words, facial expression, Tone of voice and so on. It is also said that more than 60 percent of human communication is nonverbal communication.
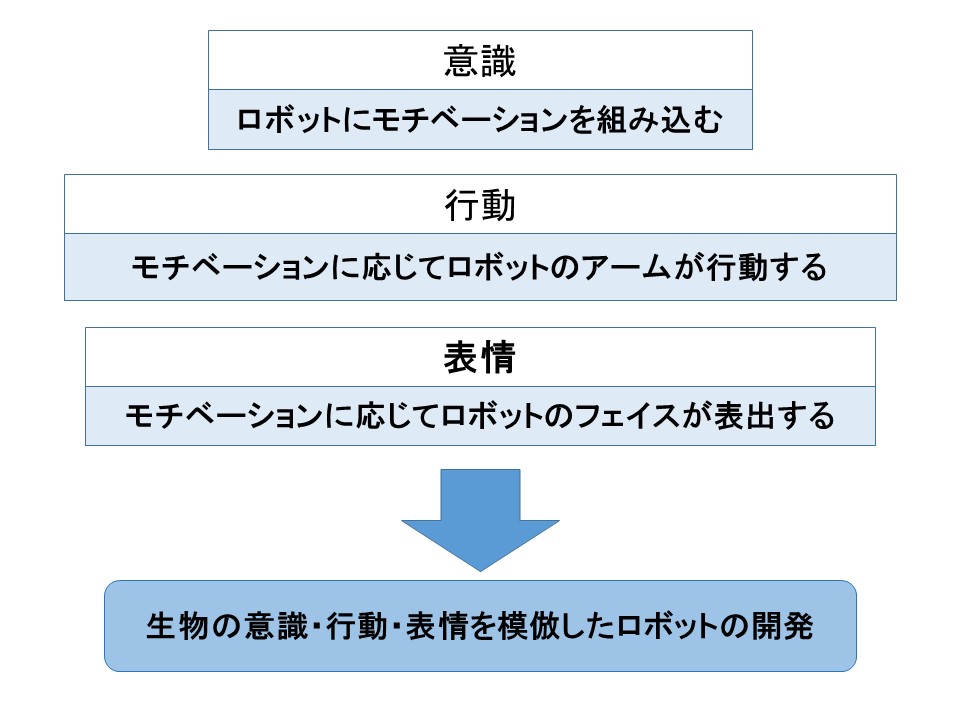
For those reasons, we have focused on the elements of non-verbal communication especially Facial expression, Body movement, and Voice intonation. By combining these three types of information, it could be possible for a robot to estimate the internal state of the user and robot can response back properly.
The following poster explains the way to construct the approaching movement focused on the Personal Space of human.