Seamless Robot


Innovative Robot for Better Life
Seamless Robot

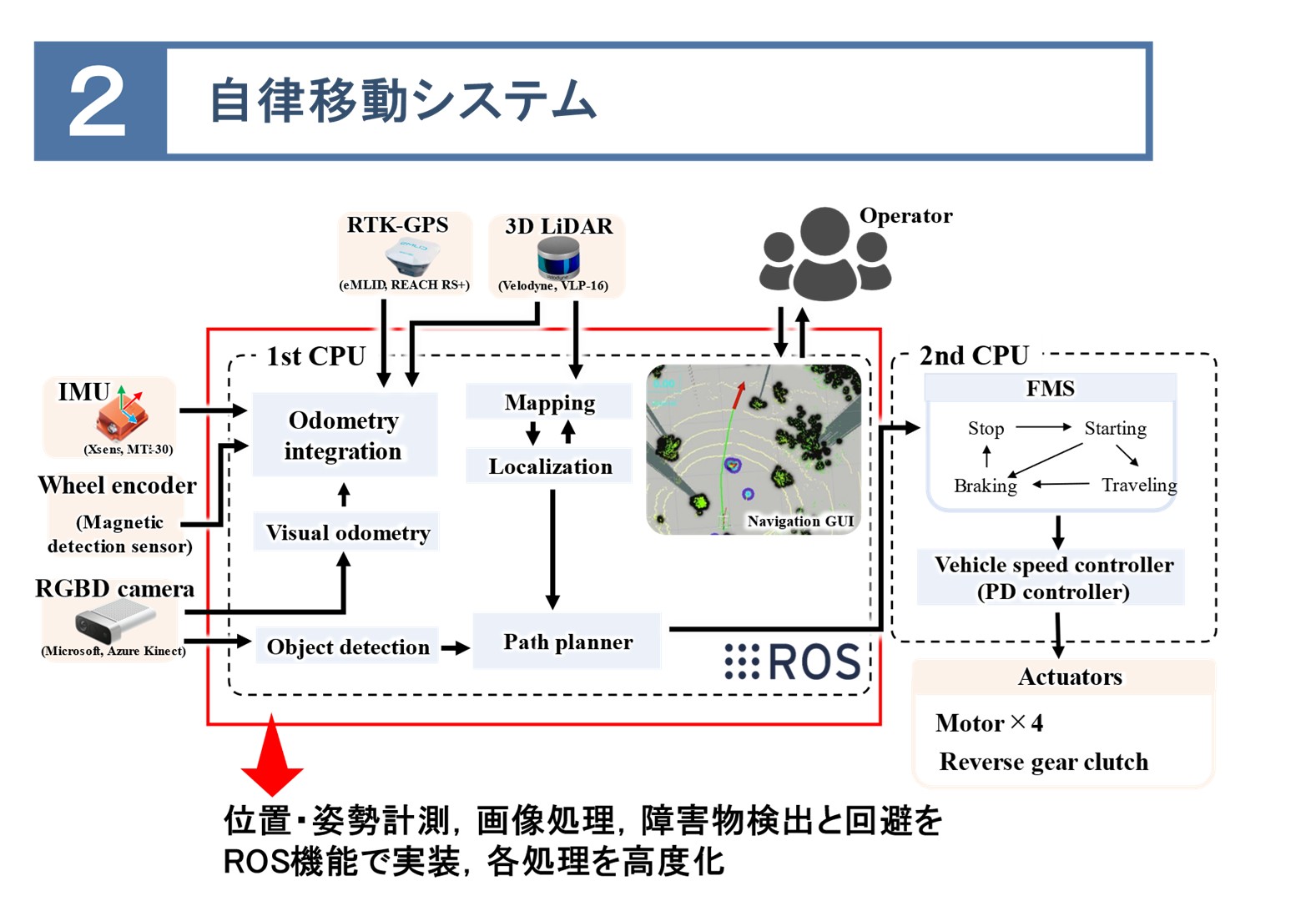
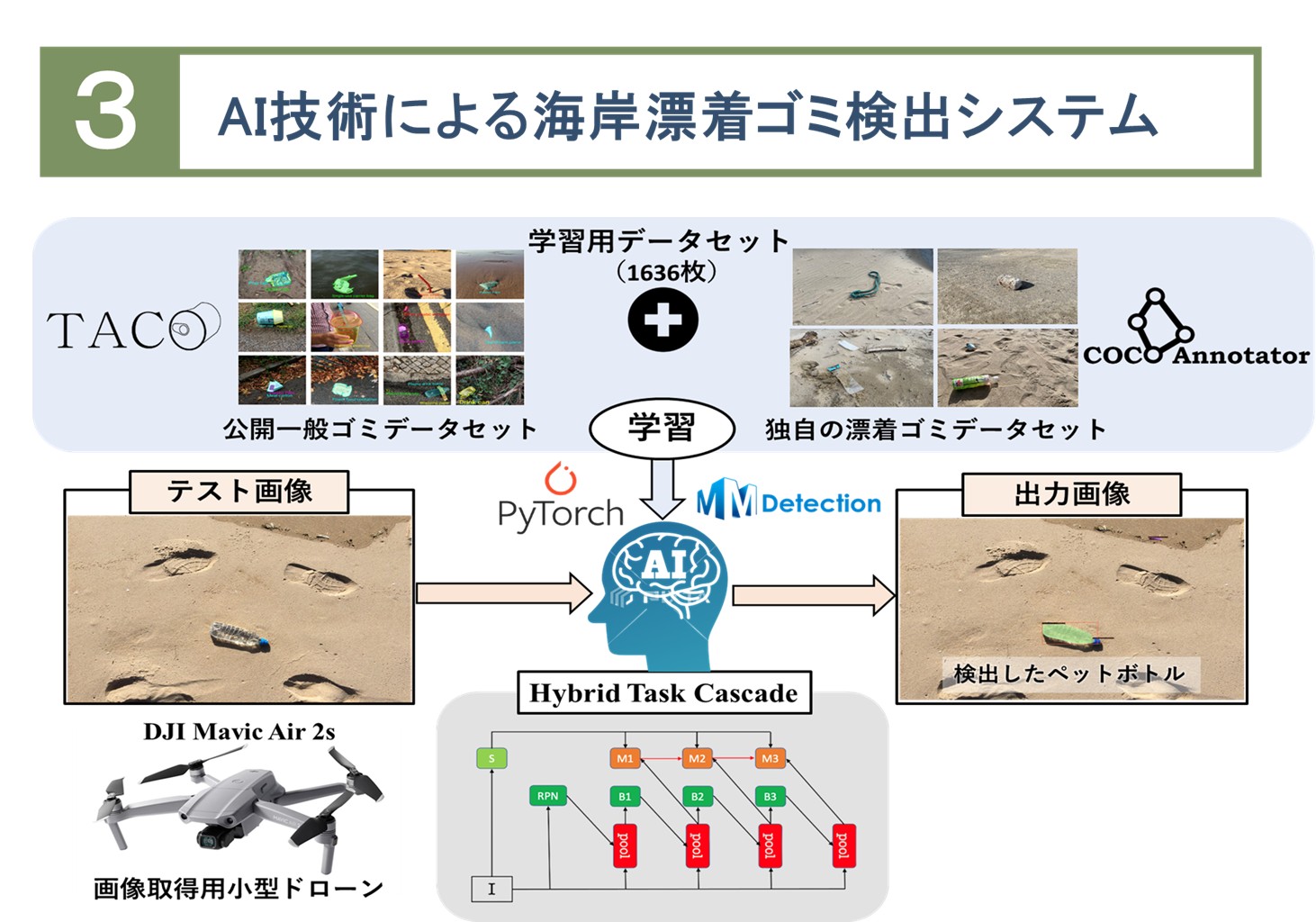
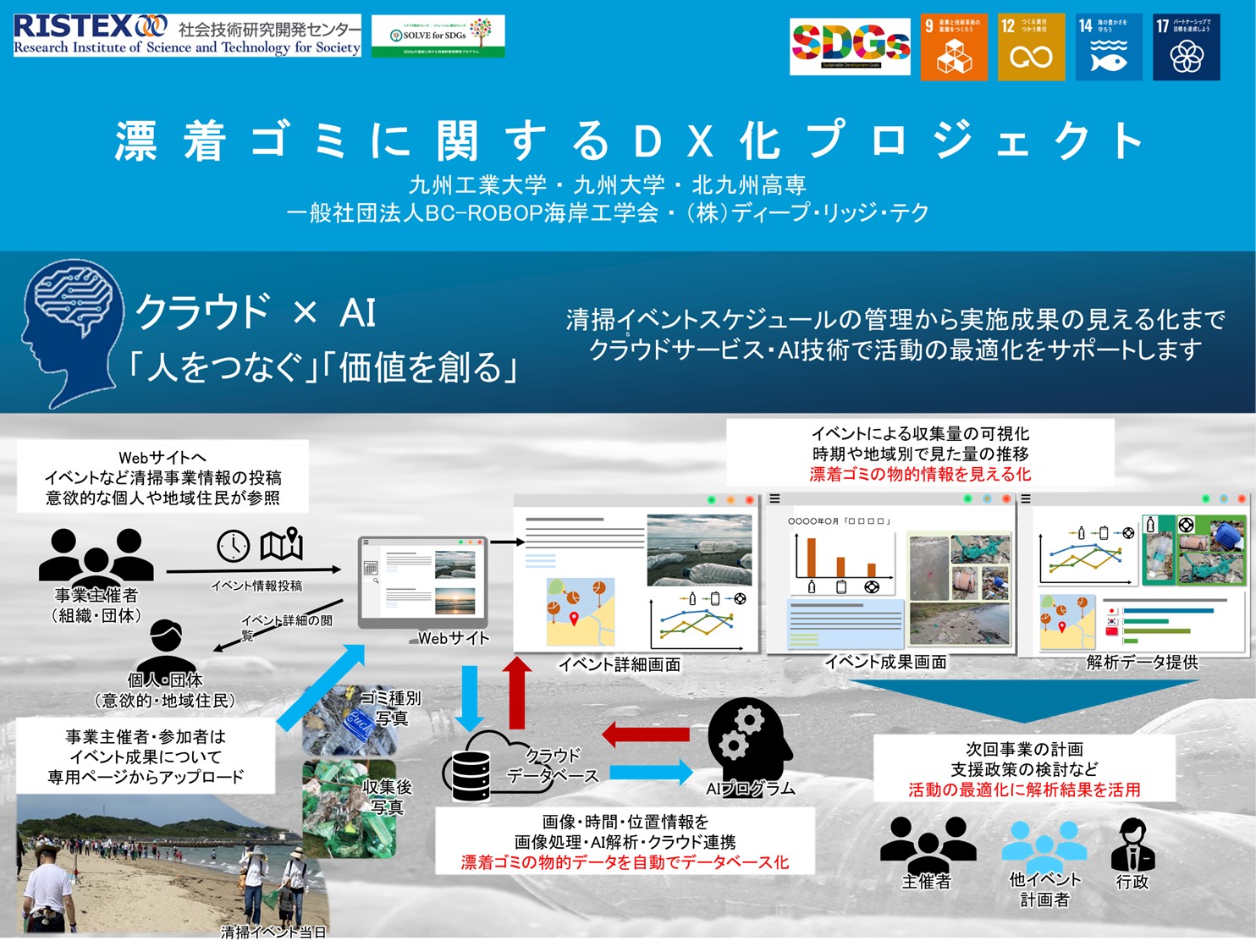
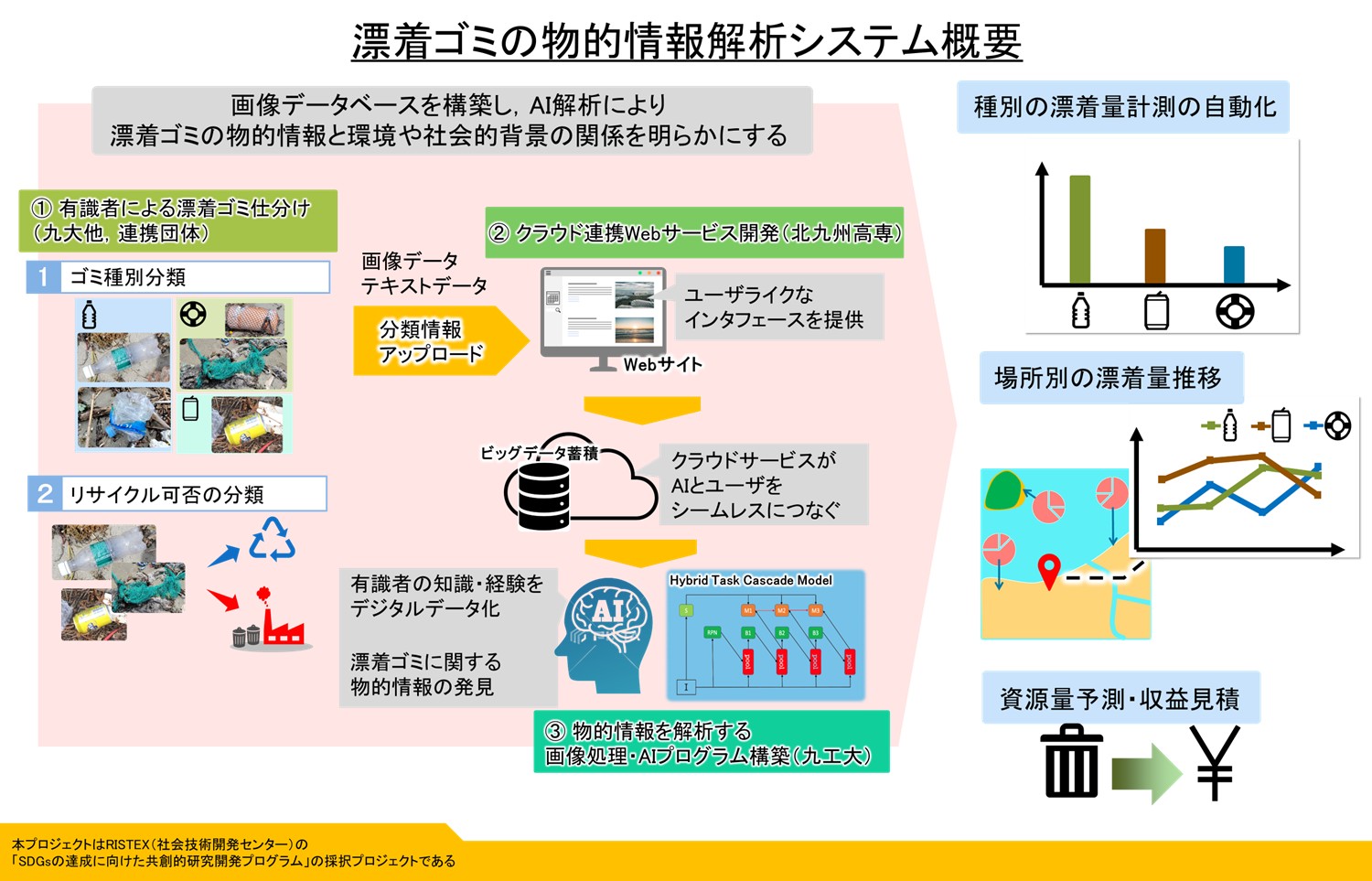
We are developing measures to solve the problem of litter drifting ashore, which has become an increasingly prominent social issue in recent years, using robots, AI, and IT technology. Although volunteers regularly pick up trash around the World Heritage sites in Munakata City, Fukuoka Prefecture, it is difficult to transport large fishing equipment by hand over long distances because it has washed ashore. We propose a collaborative effort between people and robots, whereby people pick up trash and robots transport it to collection points. We are also developing a service to manage images of trash and the amount of trash deposited for analysis of trash types and recycling after collection. We are developing and working to sustain coastal cleanups and achieve the goals of the SDGs.


Below is a video of the robot moving around the university campus. The robot is moving autonomously while judging obstacles.
①short version
②long version
Haptic Interface
In recent years, a technology capable of accurately performing precise work in the medical field is demanded. Since the information obtained from the microscope is only visual information and haptic feedback can not be obtained, problems such as breakage of instruments occur.
Meanwhile, with the advancement of virtual reality technology and haptic device, it became possible to simulate the feeling of touching virtual objects existing on the display of computers.The haptic device can simulate surgical operation, remote operation of robot, It is used in design support etc.
Therefore, in this research, we aim to develop a complex sense system of visual and force sense by microscope and manipulator aiming for more efficient fine work.
We are developing a haptic device and developing a simulation of visual support.
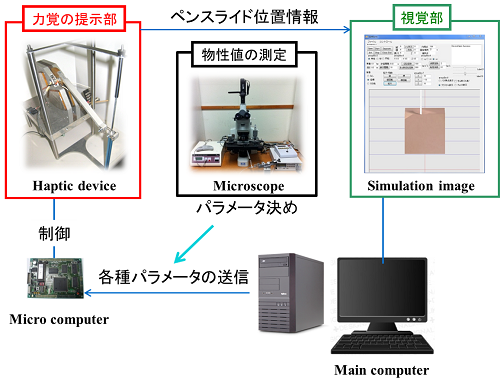
The configuration of this system is as shown in the following figure.
There is a haptic device and a control microcomputer as a force sense presentation part.
We perform sample deformation simulation on the main computer.
In addition, the parameter is obtained from the measurement of the physical property value using the microscopic image.
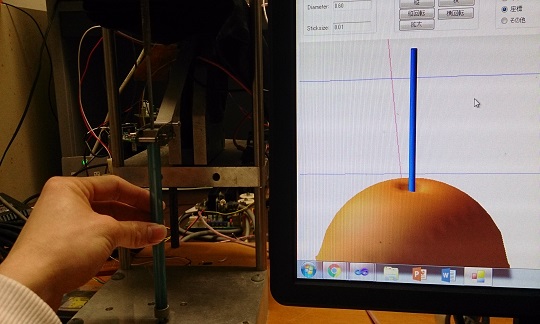
You can see the research from the following videos.
① The reproduction of force sense of salmon roe using actual image simulation
② The reproduction of force sense of salmon roe using deformation simlation

Auatomatic Piano
In recent years, with the development of electronic technology, electronic musical instruments have made remarkable progress. However, compared with the performance of the acoustic piano, the current situation is that it is inferior in terms of sound quality and realism, depending on the device to be reproduced. On the other hand, when playing with the automatic piano, you need to edit sound strength, length, tempo, etc. for each note in order to add expression to the song. Even with short songs, there are over 1000 notes on the score, and it takes a huge amount of time and effort to edit them one by one.Therefore, in this research, in order to make editing of music more efficiently, we develop the support system that can visualize performance information, can teach us about the musical knowledge and pianist’s performance characteristics.

The user edits using the editing software being developed. At this time, we will reduce editing work by using automatic conversion function using musical knowledge and user’s musical characteristics stored in the database in advance. In recent years, we are developing a system that creates a “Preference DataBase” that stores performance features.

・You can listen to the automatic piano’s performance! (length is adjusted)
“Appassionata” the first movement
“Appassionata” the second movement
“pathétique” the first movement
“Pathétique” the second movement
“Moonlight” the first movement
“Moonlight” the second movement

conbe-I
With the expansion of the robot market, the places where robots play an active role are increasing dramatically. Therefore, not only industrial robots but also service robots are being developed. There are robots such as business use, medical use, and home use for service robots. These require sophistication of intellectual behavior, development of dexterity, and user affinity.
 Therefore, we focused on user affinity in this research. The functions required for robots to realize user affinity include those that do not get bored by the user, that the user has a sense of affinity, and that heal is given to the user. In this research, we focused on animals such as “dogs” and “cats” that satisfy these matters in real life, and thought that if we can give the robot “consciousness, behavior, facial expression” of animals, we can realize user’s affinity.
Therefore, we focused on user affinity in this research. The functions required for robots to realize user affinity include those that do not get bored by the user, that the user has a sense of affinity, and that heal is given to the user. In this research, we focused on animals such as “dogs” and “cats” that satisfy these matters in real life, and thought that if we can give the robot “consciousness, behavior, facial expression” of animals, we can realize user’s affinity.

You can see the actual motion of conbe-I from the following movie. When the green ball set as the favorite thing in advance approaches the robot, the robot is pleased and goes to grab the ball with the arm. On the other hand, when the blue ball set as a dislike in advance approaches the robot, the robot grieves and the arm tries to separate from the ball.