
近年、医療分野で微細な作業を正確に行える技術が求められています。例えば、再生医療などに代表されるような細胞単位での医療が行われています。こうした細胞医療、再生医療の分野の技術は、大手製薬会社や大学・研究機関で基礎研究のステージにあります。このような研究を行う際には、細胞操作は不可欠な作業といえます。しかし、現在のマニピュレータでは顕微鏡からの視覚情報と、再現性の低い力覚のフィードバックで操作を行うため、作業には高い技術が必要とされています。このような中、現在では微細作業の効率化と再現性の高さを実現できるようなシステムの開発が強く求められています。
一方で、バーチャルリアリティ技術やハプティックデバイスの開発により、我々はハプティックデバイスを介して、コンピュータのディスプレイ上に存在する仮想物体に触れる感覚を模擬する事が可能となりました。このような技術を応用し、力覚情報を利用しての顕微操作、外科手術シミュレーション、遠隔操作、設計支援等における効率化や操作性・再現性の向上が期待されています。
ハプティックとは「触覚」を意味しており、ハプティックデバイスは、コンピュータの仮想モデルの触覚・力覚情報を、ユーザーに提供する装置を指します。
そこで本研究では、微細作業の効率化を見据えた顕微鏡とマニピュレータによる視覚と力覚の複合的感覚システムの開発を目的とし、ハプティックデバイスの開発と視覚支援のシミュレーションの開発を行っています。
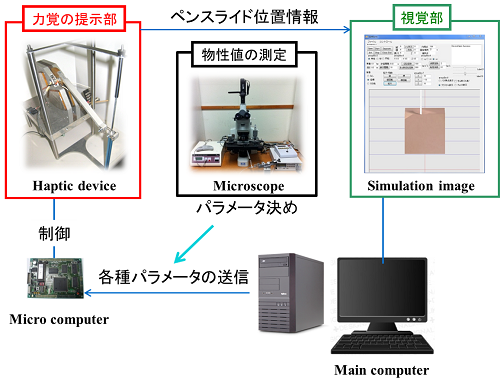
本システムの構成は以下の図のようになっています。力覚提示部としてハプティックデバイスと制御用マイコンがあり、メインコンピューターを用いて試料変形シミュレーション、ハプティックデバイスのパラメータ指示を行っています。また、パラメータは顕微鏡画像を用いた物性値の測定から求めています。
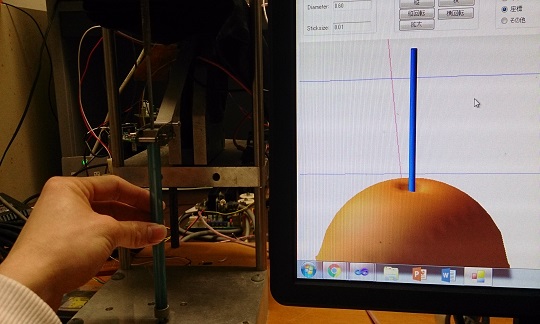
以下の動画から研究の様子をご覧頂けます。
① 実画像シミュレーションを用いたイクラの力覚再現
② 試料変形シミュレーションを用いたイクラの力覚再現