
Haptic Interface
In recent years, a technology capable of accurately performing precise work in the medical field is demanded. Since the information obtained from the microscope is only visual information and haptic feedback can not be obtained, problems such as breakage of instruments occur.
Meanwhile, with the advancement of virtual reality technology and haptic device, it became possible to simulate the feeling of touching virtual objects existing on the display of computers.The haptic device can simulate surgical operation, remote operation of robot, It is used in design support etc.
Therefore, in this research, we aim to develop a complex sense system of visual and force sense by microscope and manipulator aiming for more efficient fine work.
We are developing a haptic device and developing a simulation of visual support.
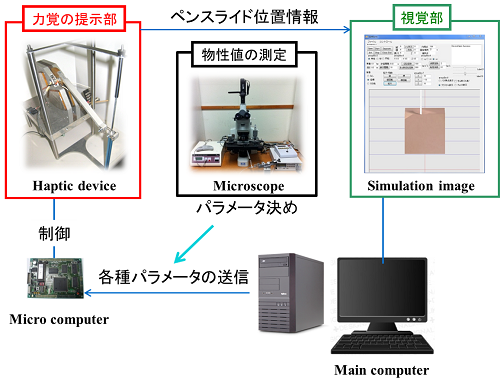
The configuration of this system is as shown in the following figure.
There is a haptic device and a control microcomputer as a force sense presentation part.
We perform sample deformation simulation on the main computer.
In addition, the parameter is obtained from the measurement of the physical property value using the microscopic image.
You can see the research from the following videos.
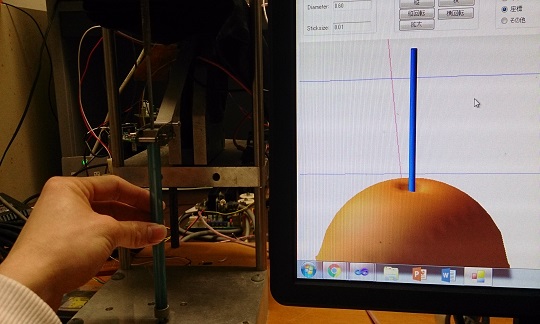
① The reproduction of force sense of salmon roe using actual image simulation
② The reproduction of force sense of salmon roe using deformation simlation